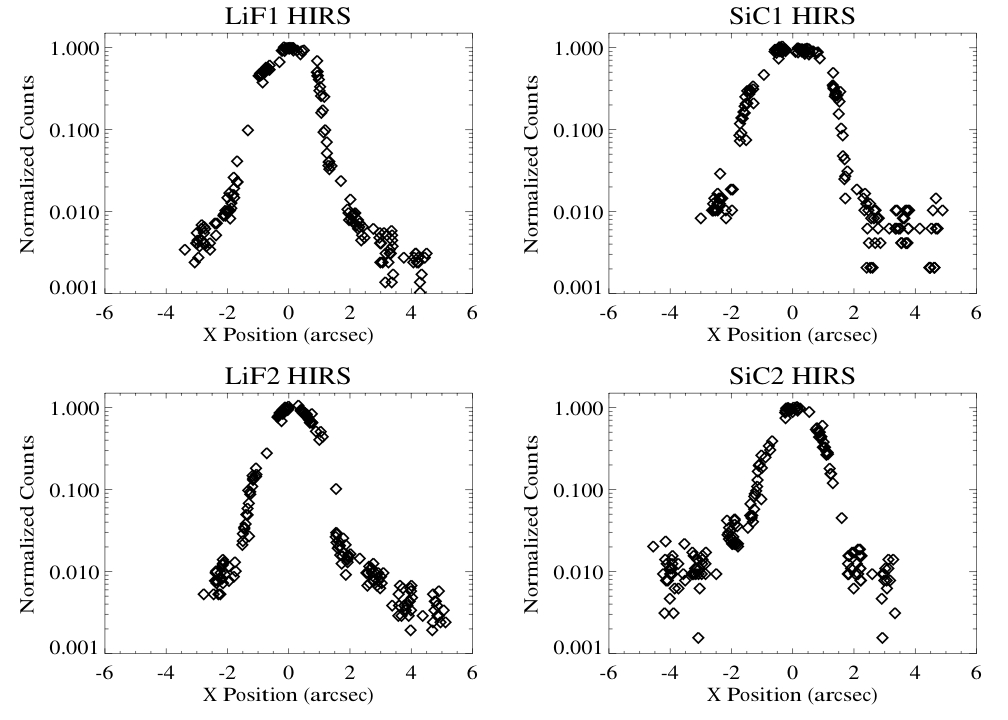
Figure 4-1: The log of the count rate, normalized to unity, is shown plotted as a function of the X-position of a point-source image relative to the center of the HIRS aperture in each channel. This is equivalent to the convolution of the telescope PSF with the HIRS aperture.
Figure 4-2: Same as Figure 4-1 above, but for the MDRS aperture.
Following the focus adjustments made in early 2000, the throughput of the MDRS aperture was measured to be 98%, and that of the HIRS aperture was 90%. The effective throughput of the narrow apertures was quite sensitive to drifts of the channel alignment on orbital timescales, and thus varied from one exposure to another in the SiC channels and in whichever LiF channel was not in use for guiding. Throughput in the HIRS aperture was also sensitive to the accuracy of both the peakup calculation and the slew executed as the final step of the peakup procedure; mis-centering of a few tenths of an arcsecond were possible and would have a noticeable impact on the throughput. When FES-B was made the guide camera in July 2005, the LiF2 FPA was moved by 400 microns along its Z-axis (see Sections 6.2.2 and 6.4.2). This had no adverse effect on the spectral resolution of point sources, but the throughput in the LiF2 channel was reduced to ~70% for MDRS and ~15% for HIRS.
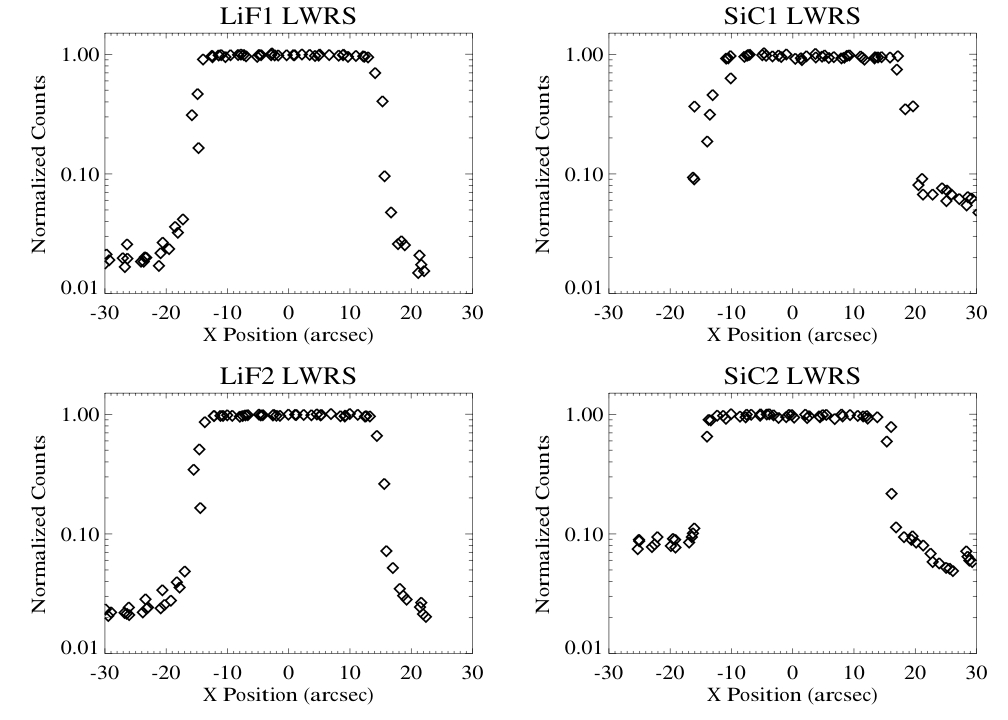
Figure 4-3: Same as Figure 4-1 above, but for the LWRS aperture.
During the
IOC period shortly after launch, it was realized that the telescope mirrors
underwent periodic motions that shifted the target’s image at the telescope
focal plane and thus its spectrum in both X and Y on the
detector. A source in either of the SiC channels could move as much as 6
arcseconds in a 2 ks time interval. This motion had two effects on the data:
first, flux was lost if the source drifted (partially or completely) out of the
aperture; second, the was spectrum shifted on the detector, degrading spectral
resolution for observations using the LWRS (30 arcsecond) aperture. The procedure for the initial post-launch
channel alignment was to perform a spiral search pattern of motions on LiF2,
SiC1, and SiC2 while guiding on the target using FES-A with LiF1 and the LWRS
aperture. The FUV count rate was monitored while using the mirror actuators to
locate the target position in the three non-guide channels. This method
required use of a moderately bright FUV point source in a fairly isolated star
field to provide sufficient counts and prevent confusion from nearby field
stars. Overall, this method worked well and was used to initially align
channels to a 15-arcsec precision. Finer co-alignment was then performed by
stepping the roughly co-aligned images across the edge of the LWRS slits. The
data were analyzed to determine the mirror rotations required to remove the
measured alignment errors at that attitude for each of the three non-guiding
channels relative to the LiF1 channel. This method allowed for
co-alignment to approximately 2 arcsec. As further alignments and observations were
attempted, it was found that all of the channels were moving with respect to
each other, with misalignments as great as 40 arcsec. It was quickly realized
that the coalignment was being lost following large changes in spacecraft
attitude that changed the thermal environment of the instrument. As a result,
grouping observations by Solar beta angle and boresight-to-orbit-pole angle
became a contraint on mission planning, and channel coalignment procedures were
needed roughly weekly instead of the expected few times per year. Small misalignments of the channels could be
removed by performing peakups in either the MDRS or HIRS aperture. This
involved performing small maneuvers of the spacecraft in the X direction and
measuring the FUV counts as the target crossed the narrow axis of the slit.
Before ACS components began to fail, the pointing of the spacecraft was
dithered in a step and dwell pattern, with nine steps separated by 3 arcsec
(MDRS) or 1 arcsec (HIRS), and dwells lasting 10 seconds long at each step.
Later in the mission, when adapting to operations with a single reaction wheel
, the step and dwell sequence was replaced by a continuous scan. Photons
occurring in the LiF and SiC counter masks for each detector (Sec. ) were
accumulated. At the end of the scan, a flux-weighted positional centroid was
computed for each channel and a test was performed to verify a peak occurred in
the data: the maximum count had to be at least 5 x sqrt(mean). The
spacecraft was moved back to the position where the guiding channel (LiF1 or
LiF2) had maximum counts and the other three FPAs were moved into alignment. If
no peak was found in the guiding channel, the spacecraft was moved to the target
acquisition position. For the other channels, an absence of a peak meant the
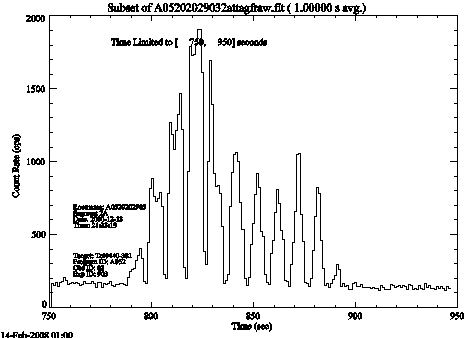
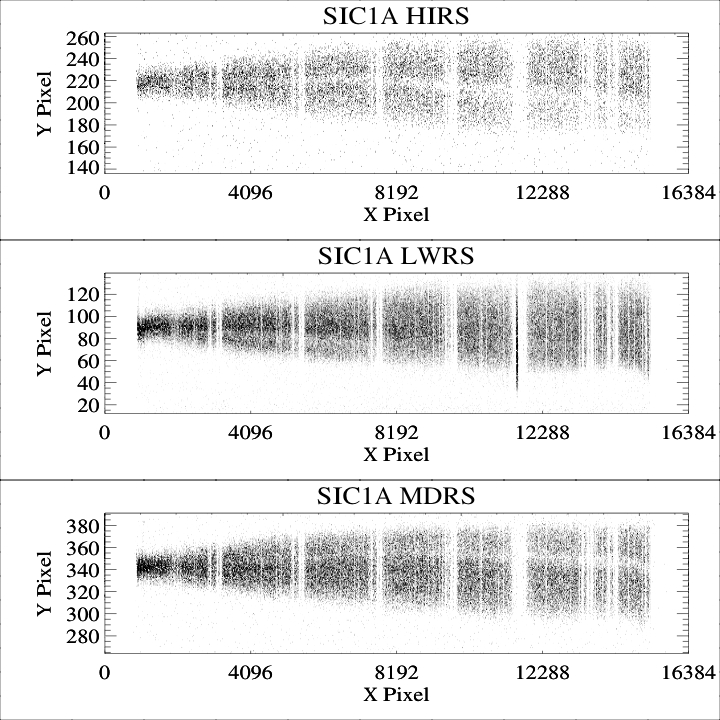
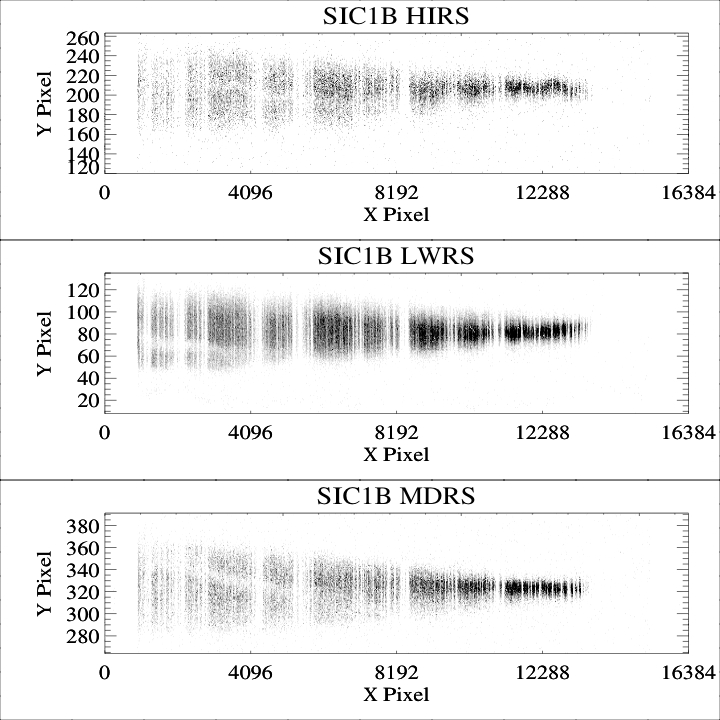
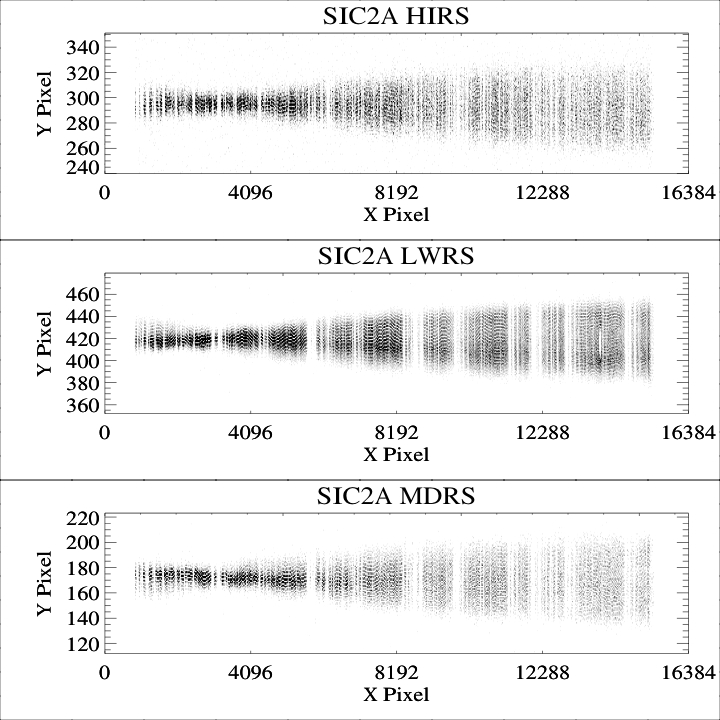
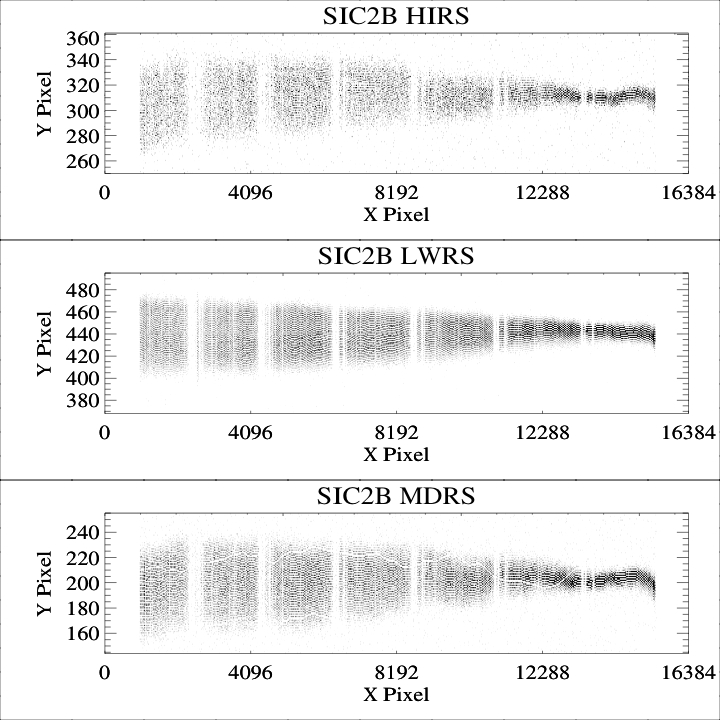
FPA was not moved. Figure
4‑1 shows an example of the counts obtained during a peakup scan. The peakup software and FPAs were designed to
eliminate channel misalignments on the order of 5-10 arcsec in the X direction.
Similar misalignment in Y was accommodated by making the slits 20 arcsec long.
The larger errors found on-orbit impeded peakup alignments in two ways. First,
if the initial position of a target in a channel was further than the width of
the slit beyond the range of the scan, the target would likely not be found.
Secondly, if multiple peakups were scheduled during an observation or a
spurious peak were found, a motion could be computed to move an FPA past its
limit. The IDS software at launch would reject all FPA motions if any one were
out of bounds, effectively allowing one bad channel to cancel the peakup
results. After the software was changed to allow all valid FPA motions to occur,
better alignment was achieved. Other peakup problems that occurred less often
were false peaks being found due to event bursts on the detector (Section 4.4.3.3
) and peaks contaminated by other objects near to the target.
Figure 4‑4: The FUSE “Image Motion” was defined as the
variation of the alignment of the SiC1, LiF2, and SiC2 channels with respect to
the reference LiF1 channel used for guiding. Although these motions were
generally quantified as being associated with the non-guiding channels, they
were caused by the motions of LiF1 in combination with the other
channels. (Any LiF1 motion was corrected by the ACS using FES Fine
Pointing Data, so it appeared to remain steady.) After the switch to FES-B in
July 2005, LiF2 replaced LiF1 as the reference channel. The observed image
motion was attributed to the thermal changes induced in the instrument by changes
in boresight beta angle and orbital pole angle. The boresight beta angle
is the supplement of the angle between the satellite-sun line and the
instrument line of sight, and the orbital pole angle is the angle between the
orbit pole and the instrument line of sight. To mitigate loss of data due to channel
misalignment while retaining observing efficiency, the LWRS aperture became the
primary observing aperture for most programs. For MDRS and HIRS
observations, two peakups per orbit were executed when necessary to
maintain channel alignment during an observation and obtain full spectral
coverage while using these apertures. A two-part strategy was developed to maintain
alignment of the four mirror channels. This strategy included both a
predictive component based on empirical modeling of changes in mirror position
as a function of boresight attitude and a periodic hard re-baselining of the
alignment. Sections 6.7 through 6.7.5.1 discuss further the
procedures necessary to maintain channel alignment, its impact on observatory
efficiency, mirror motions over an orbital observing period, the analysis tools
required to maintain alignment, and mirror motion trending. CalFUSE
corrects the non-guide channels for the mirror motion on
orbital timescales using an empirically derived correction. A more
detailed discussion is presented in the the CalFUSE pipeline paper (Dixon et
al. 2007).
The resolving power of FUSE depends largely upon the residual aberrations in the
spectrographs, primarily astigmatism, and on the imaging properties of the
double-delay line MCP detectors. The detector imaging resolution is best at the
center of each segment and degrades somewhat towards either end. In addition,
fixed-pattern noise introduced by the MCPs can cause localized degradation of
the resolution
(see Sections 4.4.2, 4.4.5, 4.4.6, 4.4.7 for details).
These effects cause the resolution to vary as a function of wavelength, and with spectrograph aperture.
Variations in detector gain over the mission (Section 4.4.2)
cause some of the detector contributions to the LSF to vary as well.
Finally, the combined effects of target motion and uncertainties in the corrections for grating motion
can cause the point source resolving power of FUSE data to vary between observations and from exposure to exposure within a given observation. CalFUSE applies a corrections for these effects to each photon in the event list for TTAG data. However, histogram data cannot be corrected on photon event timescales and the 1 × 8 binning factor of histograms gives rise to a ~5-10% reduction in resolving power compared to time-tagged data. As a result, TTAG data will almost always exhibit a higher resolving power than HIST data obtained with the same aperture. The exception is long exposures of targets that are too faint to correct properly for image motion. Careful analysis of time-tagged exposures with good S/N may yield spectra with somewhat higher resolving power than the nominal value of R=20,000.
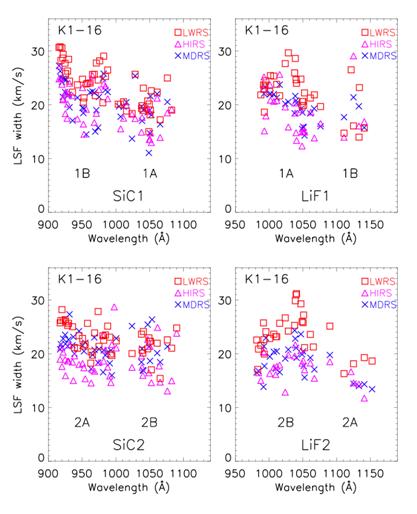
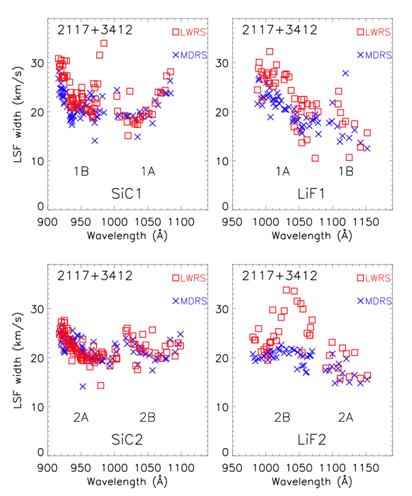
The LSF has been characterized by modeling ISM absorption along the line of sight for two representative targets: K1-16 and RX J2117+3412. The former was observed in TTAG mode for all three apertures, and the latter was observed in HIST mode through LWRS and MDRS. The data were processed with CalFUSE v.3.2.3. Spectra from each exposure were coaligned on narrow absorption features and combined. All usable exposures obtained during the FUSE mission were included. The column density and b-value were determined from profile fitting for OI, NI, FeII, and each H2 J-level observed; the b-value was also determined for HI. (Profile fits were performed using the program OWENS, developed by Martin Lemoine and the French FUSE Team.) Fits were performed independently for each channel and for the combined data set to check internal consistency, and a curve of growth analysis was performed for the H2 J=1 lines in the K1-16 spectra and for the H2 J=3 lines in the RX J2117+3412 spectra. The width of a Gaussian instrumental LSF was fit as a free parameter for each absorption line.
The results are shown in Figure 4-5 for K1-16, and in Figure 4-6 for RX J2117+3412. The LSF measurements exhibit greater scatter for K1-16 than for RX J2117+3412, because the signal to noise is lower for the K1-16 data sets, and because the IS absorption lines are generally weaker for the K1-16 line of sight. The K1-16 TTAG data do tend to show somewhat better spectral resolution than the RX J2117+3412 HIST data, but the differences are not dramatic. The K1-16 data do show a systematic trend of better resolution in HIRS than in MDRS, and in MDRS compared to LWRS. The results for the SiC channels clearly show better resolution at the midpoint of each detector segment, as expected, but the behavior in the LiF channels appears to be dominated by other effects. The LWRS LiF 2B data in particular show a dramatic decrease in resolution near the midpoint of the detector segment. The results shown here are generally consistent with the LWRS TTAG LSF measurements of Williger et al. (2005); the exception is LiF2B, for which they obtained 25 km/s at the midpoint of the segment, rising to 35 km/s at either end.
A detailed characterization of the LSF obtained from analyses of lines of sight towards white dwarfs within the Local Bubble was presented by Kruk et al. (2002) and Wood et al. (2002). They found that a two-component Gaussian LSF was needed to fit the HI Lyman series lines. A two-component LSF was not pursued in the present analysis, partly for simplicity in presenting the results, and in part because the more complex ISM and photospheric absorption spectra made it difficult to isolate the effects of two LSF components. The width of the narrow components obtained by Kruk et al (2002) and Wood et al. (2002) were similar and correspond to ~20 km/s, consistent with the single-Gaussian results presented here.
Figure 4-5: Spectral resolution measured from ISM absorption lines along the line of sight to K1-16.
There are two sources of scattered light that can add to the
background and thus compromise the instrument sensitivity: in-band scatter from
the grating itself and stray light scattered from surfaces such as the internal
spectrograph baffles or other illuminated surfaces within the spectrograph
cavity. The in-band, grating scatter was measured at the component level to be
1 × 10-5
/Å. This is a typical scattering number
for holographically-ruled gratings. In-flight measurements give a consistent
result: the integrated scattered light present in heavily-saturated absorption
line profiles was typicaly less than 1% of the continuum flux. This
contribution to the background scales with the intensity of the source. Stray
light differs in that it scales roughly with the overall airglow line
intensity. It is expected to be caused by geocoronal Lyman α
emission entering the spectrograph cavity
through either the FPA apertures or the vent. The distribution of the stray
light is not uniform, but shows considerable structure across the detector.
The FUSE Data Handbook (2009) Section 7.2 provides
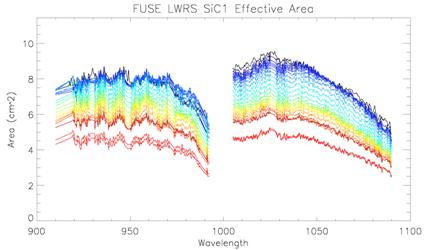
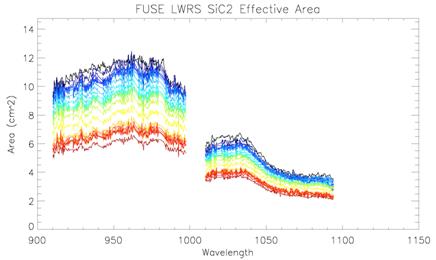
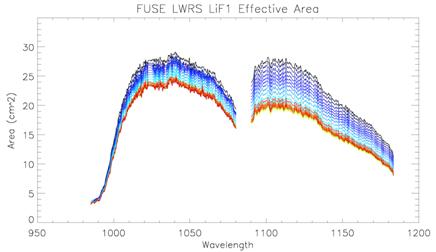
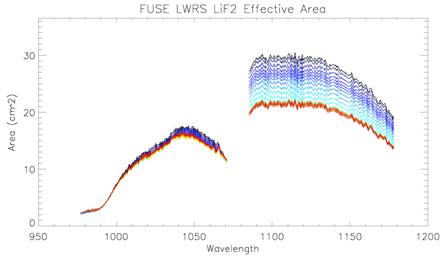
quantitative results of the on-orbit scattered light measurements. The combination of SiC and LiF
coatings on the primary mirrors and gratings was designed to maximize the
effective area across the whole FUV band. Because the reflectivity of LiF drops
rapidly below approximately 1020 Å, the effective area changed significantly
with wavelength. In addition, the gaps between the detector segments
created narrow bands (typically 10 Å wide) where the total effective area
dropped by as much as a factor of 2. Plots of the effective areas as a function
of wavelength and time for the individual detector segments are shown in Figure
4‑7. The definition of the flux calibration and the evolution of the
sensitivity over time is discussed in further detail in
Section 7.5 of The
FUSE Data Handbook (2009).
Figure
4‑7: The in-flight derived effective area as a function of wavelength
for each detector segment. Each curve for a given detector segment represents a
snapshot of the effective area as a function of time and wavelength. The family
of curves for each segment represents the degradation of the effective area
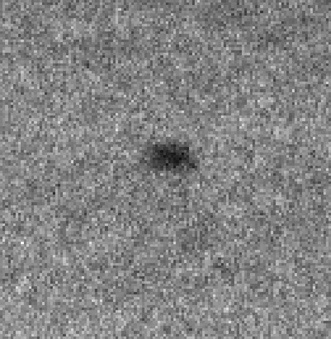
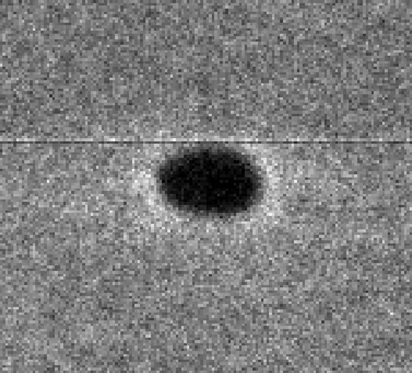
over the eight year on-orbit lifetime of the mission. The spectra of point-source
targets often show a depression in the flux that spanned as much as 50 Å of the
spectrum (Figure ref). In two-dimensional detector images, these depressions
appear as narrow stripes roughly parallel to the dispersion axis. Investigations
early in the mission showed that they were highly variable as a function of
time, even within a single orbit. These stripes, known as “worms” because of
the way they moved during an orbit, can attenuate portions of the LWRS LiF1B
spectra by as much as 50%. Worms were due to an unfortunate
interaction between the focus of the spectrograph and the detector’s quantum
efficiency grid. The optical design of the spectrograph resulted in astigmatic
images with separate sagittal and tangential focal surfaces. The detector was
placed at a location to obtain good spectral resolution, close to the sagittal
focus. At some wavelengths, the tangential focus fell close to the location of
the QE grid, which was about 6 mm in front of the detector surface, and was
curved to match the MCP curvature. The grid had 25.3 µm wires spaced ~1 mm
apart, to give an open area of 95%. Since the vertical extent of the spot was
much less than the spacing between grid wires near the tangential focus, the
effect of the grid wires could be significantly magnified; close to 50% of the
light could be blocked by a single horizontal grid wire if it fell in the right
place. The complex relationship between
the position and alignment of the grid wires, the exact locations of the
optical elements, the illumination of the telescope, the pointing stability, the
wavelength of the light, and the optical design meant that only detailed models
can predict exactly what effects the grid wires were expected to produce on the
spectra. Raytrace predictions made during the mission were qualitatively
similar to what was observed. In flight, the effects of the
grid wire shadows were found to be extremely sensitive to the exact position of
the spectrum on the detector. Therefore, as the spectra moved slightly on the
detector due to grating motion, the shape and location of a worm could change
dramatically. Small displacements of the source image along the vertical axis
of the spectrograph slits could cause similar variations in the effects of a
worm. Because every object had minor coordinate errors, they would be placed at
different positions along the slits and thus might be affected differently.
Multiple observations of a given star might also have varying worm effects,
either resulting from use of different guide stars or from differing thermal
environments at different seasons. The nature of these variations depends in
part on the orientation of the grid wires. When the wires are oriented parallel
to the dispersion plane, the degree of obstruction is sensitive to the position
of the spectrum primarily at wavelengths in the vicinity of the astigmatic
correction points. For these portions of the detectors, the effects of the
worms are fairly stable and the flux calibration is reliable. In some
places, however, the grid wires are oriented at a modest angle with respect to
the dispersion plane. In these cases, vertical motion of the spectral image
causes the region being obscured to shift in wavelength space. The flux
calibration is not reliable in these cases, but fortunately the regions
affected in this manner are limited. The worm in LWRS LiF1B was by far the
strongest and most variable; for this channel, the flux calibration was defined
so as to represent the sensitivity in the absence of the worm, so that it would
always appear as absorption. The calibration for the other channels was not
adjusted in this manner, but rather was defined from the mean of numerous
observations of standard stars. The case that may have the greatest effect on
users is the worm in LWRS SiC1B, which cuts diagonally across the spectrum at
wavelengths longward of about 975 Å. At times when the worm is shifted towards
the midplane of the spectrum, the reported flux will be too low, but at times
when the worm is shifted further away from the midplane, the reported flux will
be too high. The flux calibration issues are discussed in more detail in
Section 7.5 of the FUSE Data Handbook. (The spectra of GD 659 in this section of the Data Handbook illustrate the case
where the SiC1B LWRS worm has shifted off of the spectrum, causing a
spuriously-high flux to be reported for the last few angstroms of the
spectrum.) While the worm was most
prominently seen in LWRS LiF1B spectra (with flux loss on the order of 50% at
some wavelengths), it was present at a lower level in most FUSE channels and
apertures. Although no systematic investigation of all worms could be made, a
large number of calibration exposures were examined in order to understand the
effects of the worm on the data. Table 4.3‑2
summarizes the results of this investigation. Table 4.3‑1: Summary of worms identified in the FUSE data.
Since the position and strength
of the worm in a given segment varied so strongly as a function of position of
the target in the aperture, there is no simple, automated way to correct for
it. As a result, worm effects remain uncorrected in the calibrated FUSE data,
and thus observers should examine their data carefully in order to assess the
effects of the worm. It should be noted that for a
uniformly filled slit the horizontal grid wires blocked a much smaller fraction
of the light, so the effect is much smaller. Thus no worms were seen in the
airglow lines.
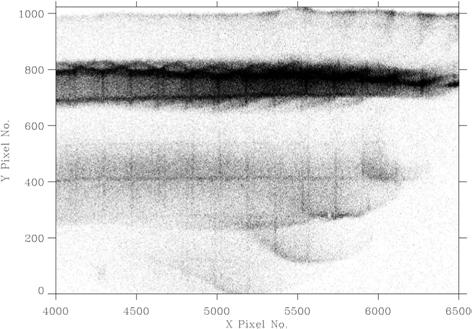
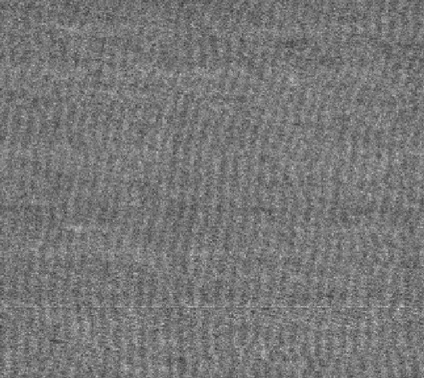
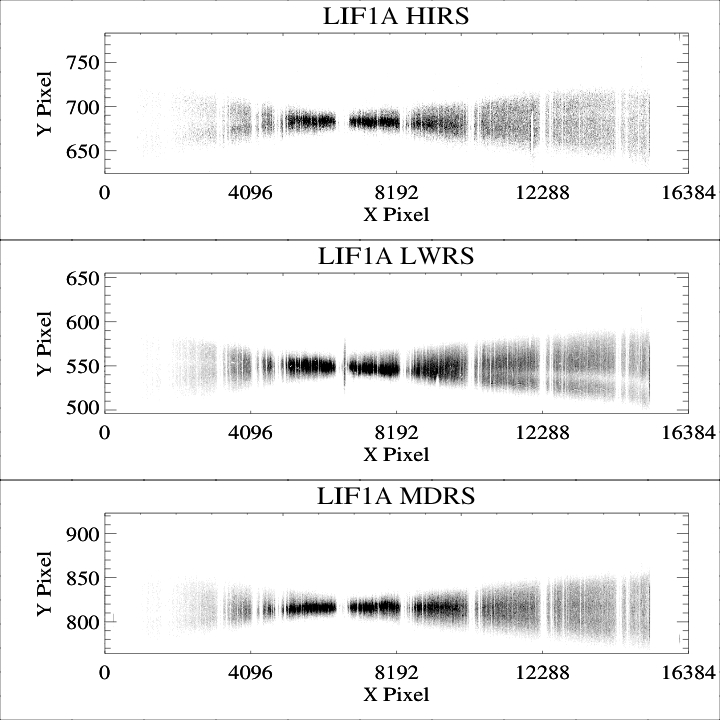
Figure 4-8: Spectral images of a stellar spectrum obtained in the LiF1 channel for each aperture are plotted for detector segment 1A. The grey scale is inverted, so that regions of high count rate appear dark. The narrow vertical lines are absorption features arising from interstellar gas, primarily H2. The broad horizontal stripes are shadows cast by the detector QE grid wires, aka the "worms".
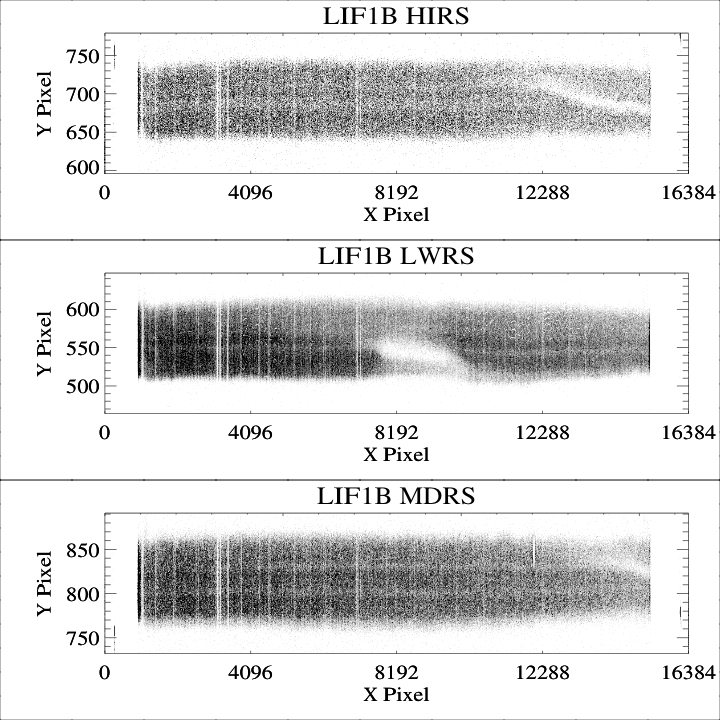
Figure 4-9: As in Figure 4-8 above, but for LiF1B. Note the strong worm feature in the LWRS spectral image.
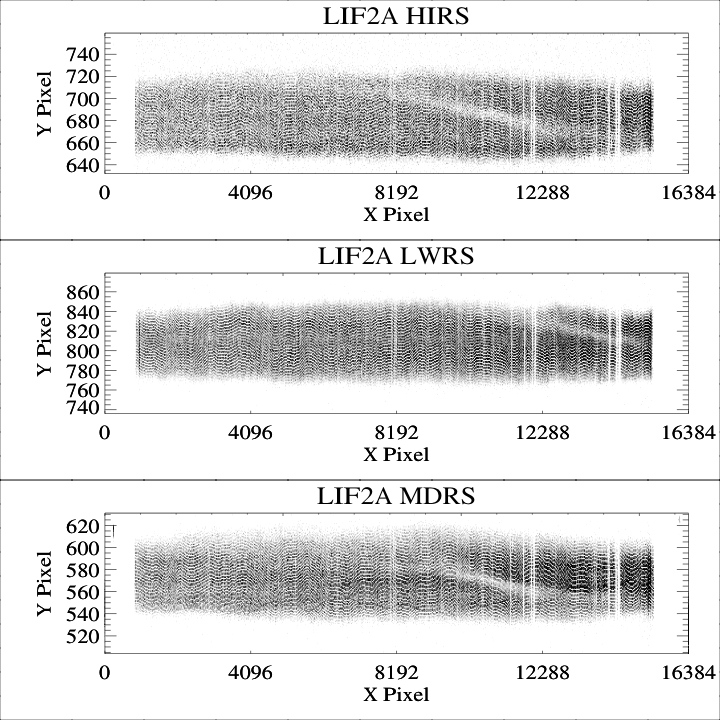
Figure 4-10: As in Figure 4-8 above, but for LiF2A. In addition to the worm features present in each spectral image, faint single-pixel-wide horizontal moire patterns are evident, which are an artifact of the distortion corrections.
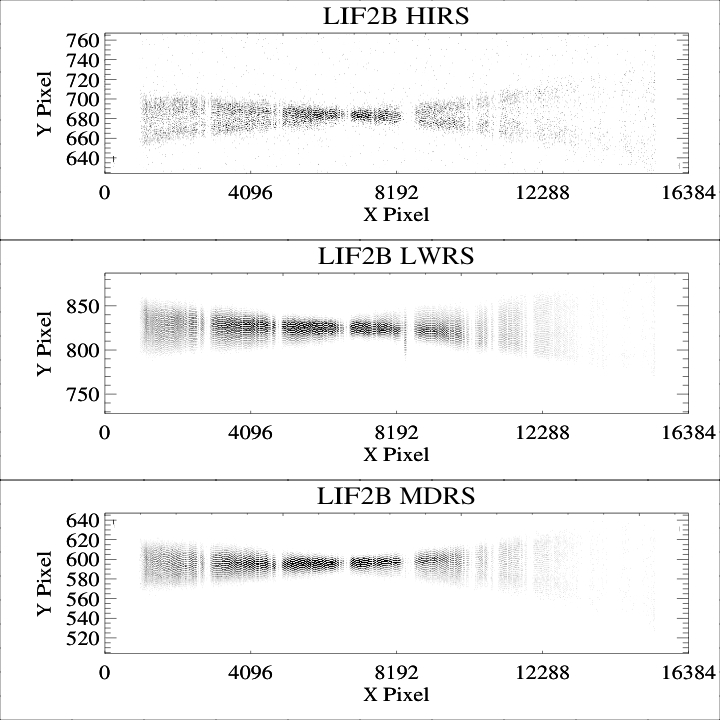
Figure 4-11: As in Figure 4-8 above, but for LiF2B.
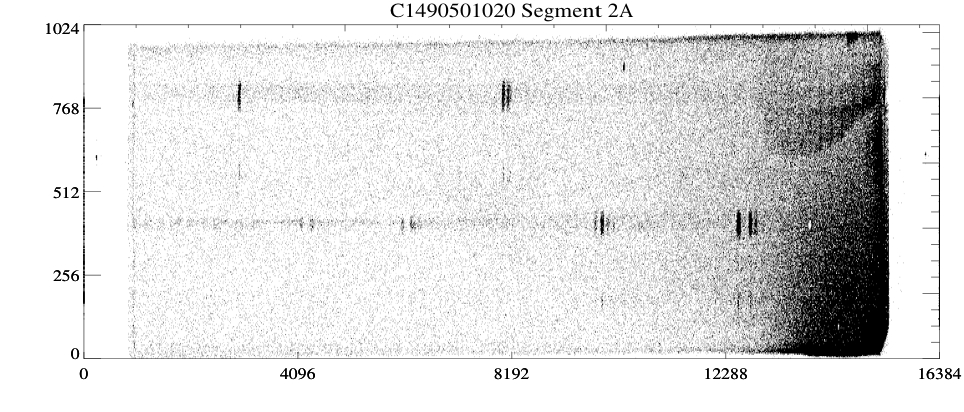
Figure 4-12: As in Figure 4-8 above, but for SiC1A.
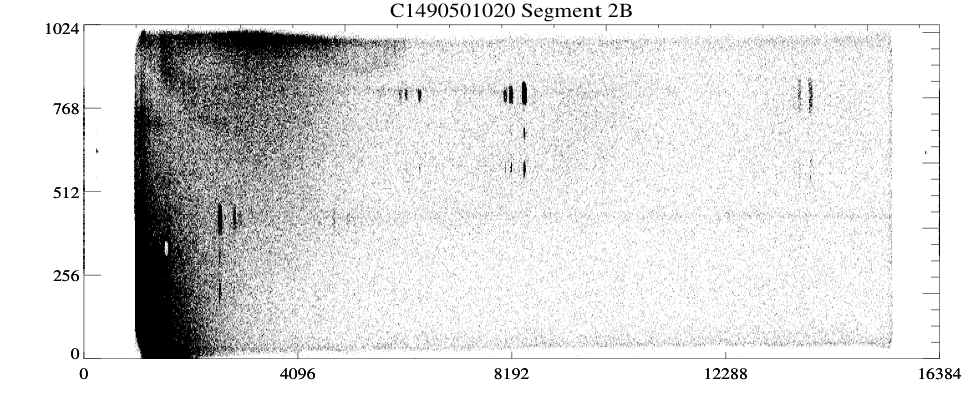
Figure 4-13: As in Figure 4-8 above, but for SiC1B.
Figure 4-14: As in Figure 4-8 above, but for SiC2A.
Figure 4-15: As in Figure 4-8 above, but for SiC2B. Worms are weak or not present. The very thin white jagged line running across the MDRS spectral image is an artifact from the distortion correction; some residual vertical distortion is present in the HIRS and MDRS spectral images beyond pixel 12000.
When the first exposures were taken during IOC, it was
discovered that the Lyman-β airglow
lines were moving on the detector in both the dispersion and cross-dispersion
directions as a function of time. Since the airglow emission fills the
apertures, these motions are distinct from those due to the motions of the
mirrors. Instead, they are due to small rotations of the gratings. The exact
cause of these rotations was unclear, but they were apparently due to changing
thermal conditions at the top of the instrument where the gratings were
mounted. A detailed examination of the
motion of the airglow lines as a function of various orbital parameters showed that
both the amplitude and direction of the motion were periodic. The motion
was also found to be a strong function of orbital phase and was repeatable for
a given beta angle, pole angle, and position angle. These motions shifted both the
target and airglow spectra by as much as 15 pixels (peak-to-peak) in both the X
and Y axes on the detectors. Figure 4‑16 shows an example of the variation for a
single observation. An empirical model of the motion
was derived by examining the shifts in many exposures. Early in the mission,
the limited data available led to a simplified model that was a function of
beta angle and declination, and consisted of a sum of sinusoids with periods of
one orbit for each beta and declination range. As more observations were made
at different pointings, this model was refined, and the final model was based
on all the data collected from the beginning of the mission through early
September 2006. Periodic motions on orbital, diurnal, and precessional (~60
day) timescales were identified in this data, although the final calibration
file (grat005.fit) uses only constant and orbital terms due to limitations in sky
coverage in the data. The motions and offsets were modeled as a function of
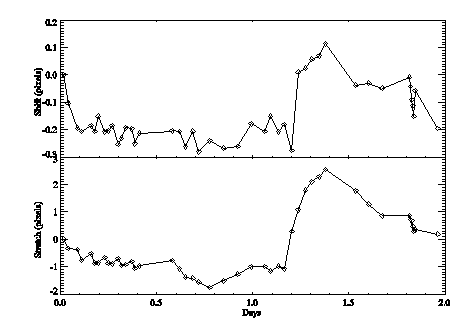
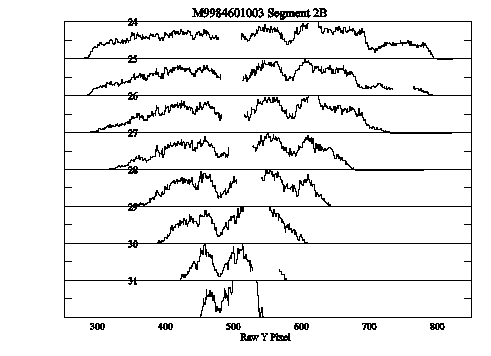
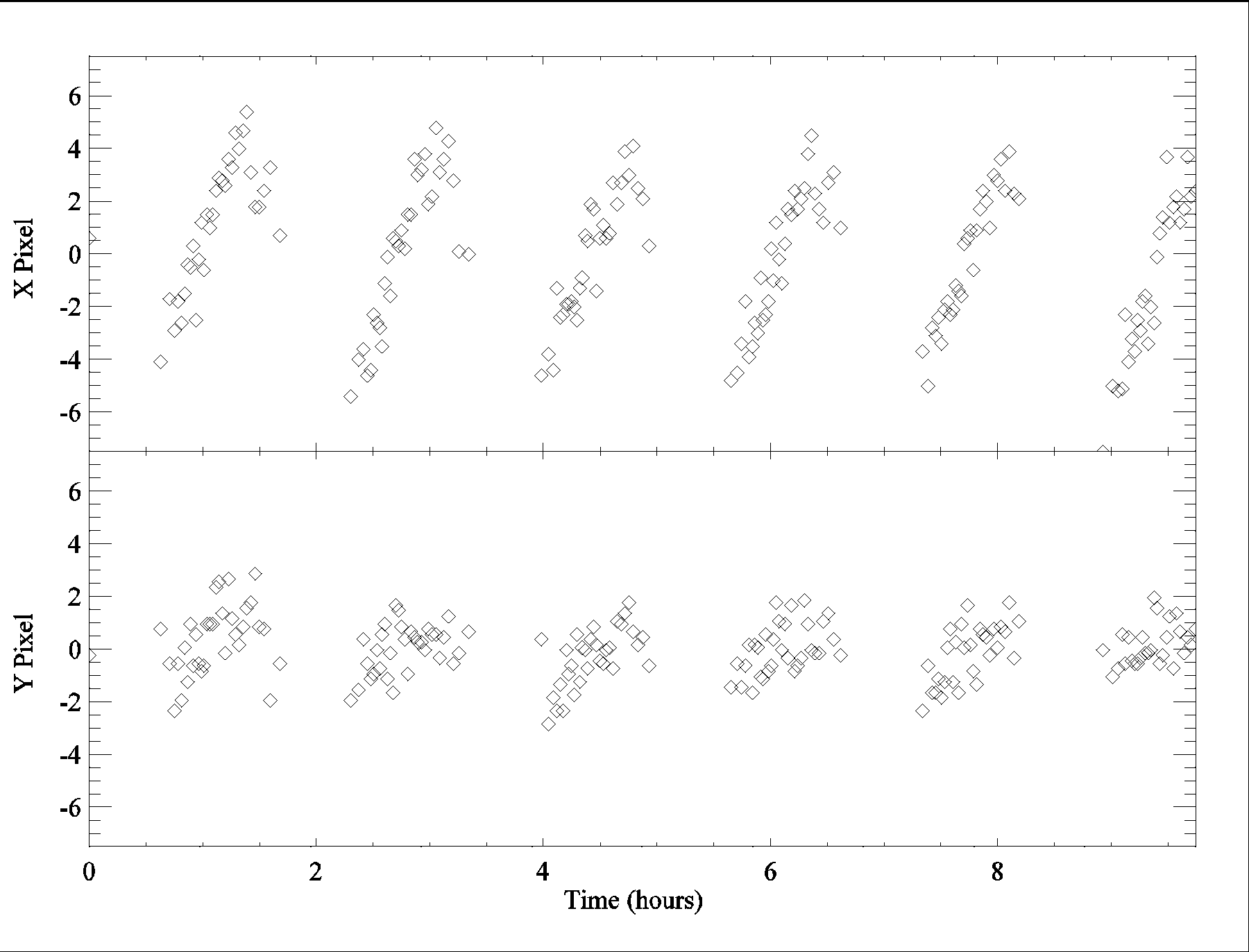
beta angle, pole angle, and position angle. Figure 4‑16: For a
single observation (S505702) the position of the LiF1A Lyman-β
airglow line on the detector is shown as a function of time. Each
point represents the average position on the detector of ~500 consecutive
airglow photons.
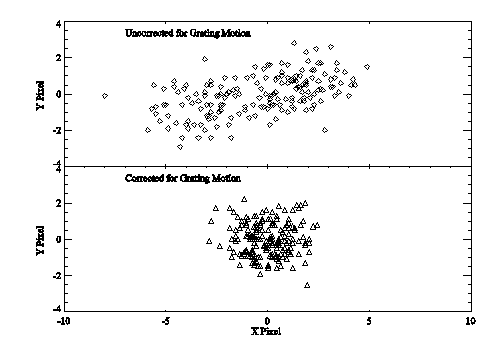
As shown in Figure 4‑17, the
grating motion correction can make a significant improvement in the measured
resolving power. In the example shown, each point represents the average
position of approximately 500 consecutive Lyman-β
photons in the LiF1A spectrum. Without a correction, a peak-to-peak variation
of more than 11 pixels is seen. By applying the grating motion correction, this
variation is reduced by more than a factor of two. Figure 4‑17: The same data as in Figure 4‑16 is shown both before
(top panel) and after (bottom panel) the CalFUSE grating motion correction is
applied.
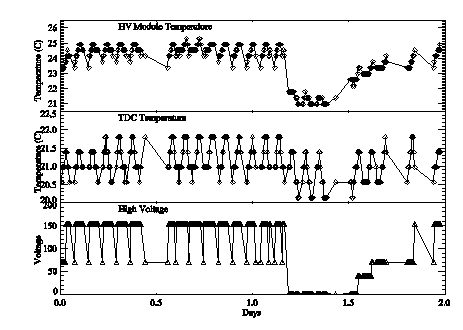
The high voltage on each of the
four segments was independently controlled. At any given time, there were four
important high voltage levels on the MCPs for each segment: During normal operations the high
voltage cycled between SAA and FULL. A single command would bring the high
voltage from SAA to FULL in a few seconds. These transitions were scheduled to
occur autonomously before science exposures began. Similarly, normal FULL to
SAA transitions occurred outside of exposures. Ramping up the high voltage all
the way from HV ON to FULL, however, was done manually from the ground, since
autonomous ramp ups were never implemented. Such ramp-ups were necessary,
for example, whenever a single-event upset (SEU) (Section 6.3.4) caused a
detector reboot, or whenever a high-voltage transient, or “crackle”, caused an
autonomous shut down of the high voltage (Section 6.3.5). Ramping up the high
voltage from the ground was a multi-step process that could take a large
fraction of a day; it was typically done using one of two methods. Both
included a relatively quick (typically 1 to 3 orbit) ramp to SAA level. The
standard ‘slow’ ramp procedure then increased the voltage in six steps up to
FULL, usually over 6 orbits. Alternatively, the ‘fast’ ramp up instead involved
a wait of about six hours at SAA level followed by a single command to increase
the voltage to FULL. Early in the mission, the slow ramp-up was used
exclusively. Eventually, the fast procedure was used in order to speed up the
process, but the slow one was still used if a fast ramp up resulted in a
crackle shutdown. Because ramp-ups were done
asynchronously with the observing schedule, a significant number of
observations were taken with one or more segments at HV levels other than those
described above. The minimum and maximum high voltage levels during an exposure
are recorded in the DETnHVmL and DETnHVmH header
keywords in the data files (n=1,2; m=A,B), and the HV_FLAG notes
if the voltage is not at its nominal level. CalFUSE uses these values to
determine whether or not the voltages were within the appropriate ranges and if
the data should be excluded. High voltage as a function of time during each
exposure is also available in the hskpf.fit and Intermediate Data Files (IDFs).
By default, CalFUSE excludes data taken when the high voltage is too low. Among the most serious detector
effects impacting the science data was that of gain sag. As a MCP is exposed to
incident radiation, its ability to replenish the electrons in the MCP glass is
diminished. This effect, though nonlinear and dependent on many variables,
worsens with increased exposure. The result is that the secondary emission
coefficient drops as a function of time, so that an incident photon will no
longer produce as many electrons at the back end of the MCP stack as it once
would have. This decrease in charge is known as gain sag. A small amount of gain sag may
produce no noticeable effects on the data; the first effect is simply a shift
in the pulse height distribution to lower values. A significant drop in gain
could cause the events with the lowest pulse height to be lost below the
threshold of the sensing electronics. But before that occurs, there may be
other effects. The DDL detectors on FUSE were affected by detector walk, which
is a dependence of the calculated X position of the photon on the pulse height
of each event. Since the calculation of the incident position relies on a
timing measurement between two pulses, the shapes and sizes of the pulses can
affect this determination in an important way. One solution to the problem of
gain sag is to increase the high voltage across the MCPs, which boosts the
secondary emission coefficient. If the gain sag is not uniform across the
detector, however, raising the voltage may not completely solve the problem,
since some less-sagged regions may end up with a gain that is too high for
proper processing (Section 4.4.6.3). In addition, higher voltage
levels may cause other problems. In the case of FUSE, the incidence of crackles
sometimes increased as the high voltage was raised. In particular, the voltage
on segment 2A could not be raised above 149 digital units without the number of
crackle shutdowns increasing dramatically (section 4.4.1) Since the FUSE instrument had no
shutter, light from the sky fell on the detectors whenever the baffle doors
were open. Thus, whenever the high voltage was above SAA level and a science
target was placed in the aperture before an exposure began, or was left in the
aperture after an exposure ended, charge was extracted from the MCPs even
though the data were not being recorded. Similarly, nearly continuous exposure
to geocoronal airglow lines from the earth resulted in a large amount of
exposure at the locations a few bright emission lines, such as Lyman-β, N I,
and O I (Section 9.2 ) During detector fabrication,
measurements were made of the reported locations of an array of regularly
spaced pinholes as the voltage (and thus the detector gain and pulse height)
was varied. These tests were then considered when decisions about the final
operating voltages and electronics adjustments were made. However, no detailed
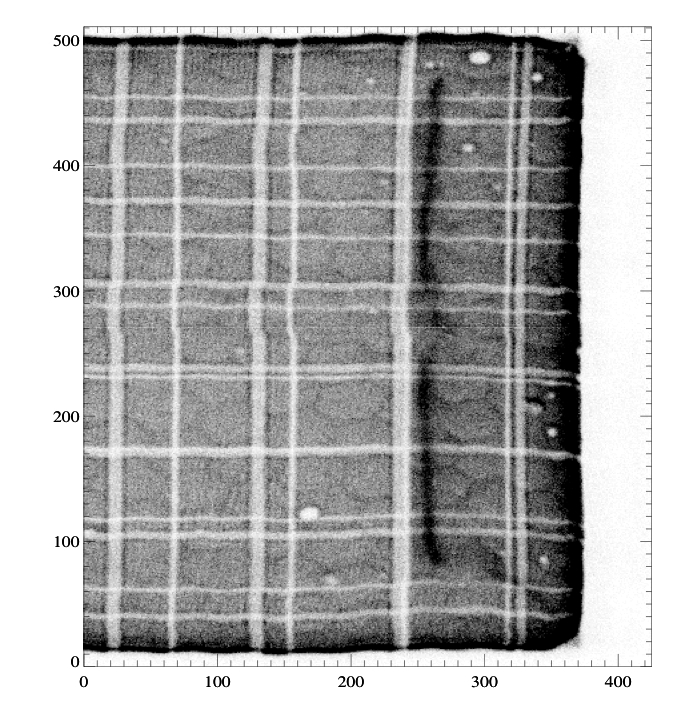
map of walk as a function of position was made before launch. After final assembly of the
detector these tests could not be repeated, but the plasma and QE grids, which
cast strong shadows on the detectors when illuminated by the stim lamps, proved
useful for measuring the effects of walk
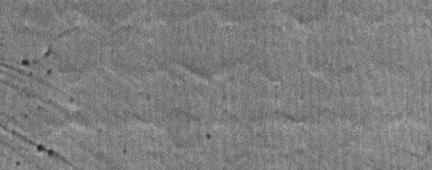
(Section 6.3.1.3). Figure 4‑18 shows a
small portion of the sum of more than 80 stim lamp exposures at several
different pulse height values. It is obvious that the shadows of the grid wires
shift in the X direction as a function of pulse height. The amount of the shift
varies with both pulse height and X position on the detector. Figure 4‑18: Multiple techniques were used to
minimize the effects of walk on the FUSE data. These included (1) adding an
‘occultation manager’ which lowered the high voltage to SAA level whenever it
wasn’t needed (section 6.3.2.2); (2) regularly raising the high voltage, when
possible, to increase the overall gain of each segment
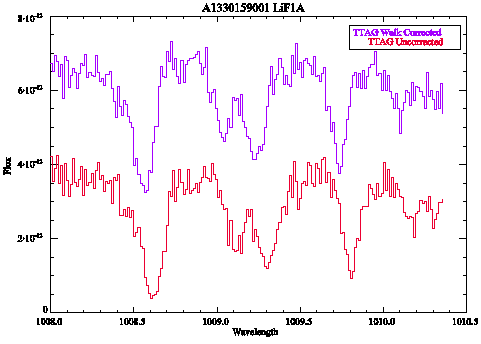
(section 4.4.2.2 The result of applying the
CalFUSE walk correction to a spectrum is shown in
Figure 4‑19, where the
same data is plotted with and without the walk correction. It is clear from the
figure that the wavelength scale differs between the two. In addition, it can
be seen that the walk-corrected spectrum has a higher resolving power. For TTAG
data, the position of each photon can be adjusted based on its pulse height.
For HIST data, however, where the pulse height data is not available, shifts
are made based on the average pulse height found at each location on the
detector based on TTAG exposures taken at nearby times. Thus the HIST
correction was only an average correction and although it helped correct the
wavelength scale, it did not do a good job of improving the resolving power.
Localized regions of gain-sag caused by airglow emission also resulted in spurious spectral features in HIST data, particularly at the wavelengths of the NI and OI airglow lines falling on LiF2a; see Figure 7.7 in Section 7.3.4 of The FUSE Data Handbook for an example, and Section 9 of this document for a listing of airglow lines.`
The FUSE design did not permit
the spectra from a particular aperture to be moved to different locations on
the detector, so the same spectral features always fell on the same part of the
detector. However, the astigmatic height of the images did spread the damage
out in the cross-dispersion direction. In addition, the grating motion (section
4.3.5), moved the spectra in both directions, which lessened the effect.
Despite this, however, significant gain variations were seen due to variations
in exposure as a function of position on the detector. Figure 4‑20 shows an example
of the effect on segment 1A. The mean pulse height is shown as a function of X
pixel at two Y locations on the detector (where the LiF LWRS spectrum falls and
in a background region) near the beginning of the mission (exposure M9980101001)
and near the end (M9986701001). The gain of the background region increased
substantially during the mission due to the increases in high voltage. The LiF1
LWRS region shows significant gain sag near the end despite the increased
voltage. The gain sag at Lyman-β (× ≈ 7000) is especially obvious, and the gain
varies significantly depending on the amount of exposure seen during the
mission. Figure 4‑19: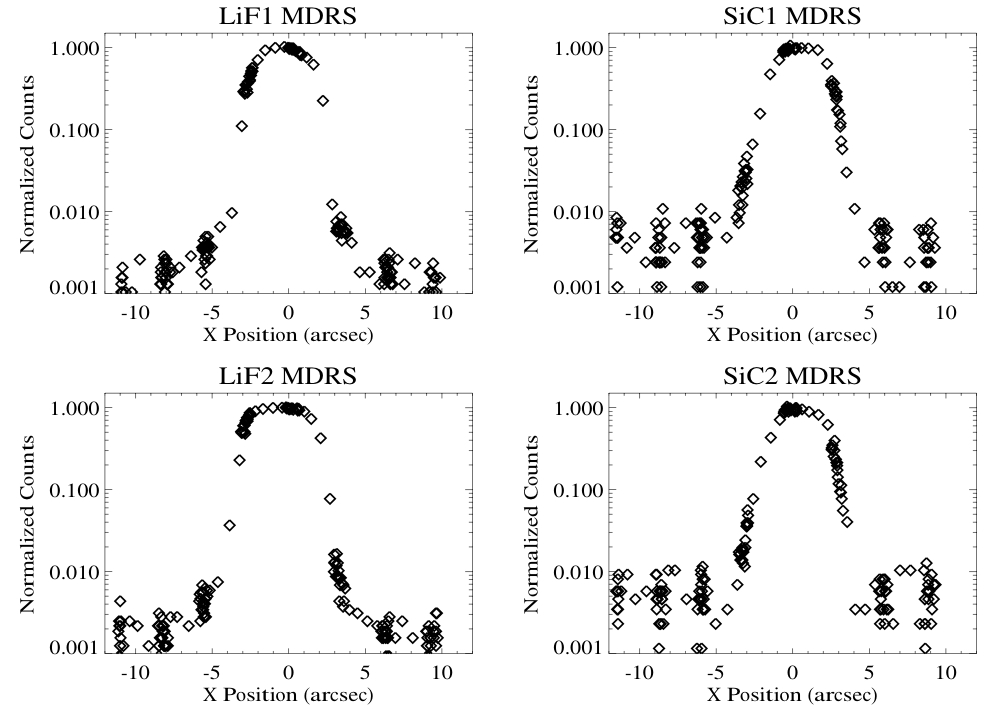
4.2
Telescope Alignment Performance
4.2.1 Initial
Alignment
4.2.2 Target
Peakups
4.2.3 Mirror
Motion Anomaly
4.2.3.1 On-orbit
Mirror Motion Mitigation Strategy
4.3
Spectrograph Performance
4.3.1 Spectrograph
Resolving Power
4.3.2 Scattered Light
4.3.3 Effective Area
4.3.4 “The
Worms”
Spectrum
LWRS
MDRS
HIRS
LiF1A
> 1050 Å- horizontal
< 1000 Å - horizontal (weak)
< 1000 Å, >1050 Å - horizontal (weak)
SiC1A
1050 - 1080 Å - horizontal
~1080 Å - horizontal (moderate)
<1065 Å - horizontal
LiF1B
~1155 Å - diagonal
Full - horizontal (2 weak stripes)
>1165 Å - diagonal (plus 2 weak horizontal worms)
SiC1B
>975 Å - diagonal (moderate)
> 960 Å diagonal (moderate)
> 970 Å - diagonal
LiF2A
<1115 Å - diagonal
1100-1130 Å Diagonal (moderate)
1100-1130 Å - diagonal (moderate)
SiC2A
-
-
-
LiF2B
-
< 990 Å - horizontal (weak)
< 1010 Å, > 1050 Å - horizontal (weak)
SiC2B
-
-
< 1035 Å - horizontal (weak)
4.3.5 Spectral
Motion
4.4
Detector On-orbit Performance
4.4.1 High Voltage
Operations
4.4.2 Gain
Sag and HV Adjustments
4.4.2.1 Gain Sag and Detector “Walk”
Effects

In addition to monitoring of the gain and walk effects using the stim lamp exposures, gain sag as a function of time was tracked by constructing a cumulative exposure map for each detector segment. The number of events at each pulse height value incident on each pixel location was monitored so that trends could be identified early (Sahnow, 2004). These total count map and total gain map files were originally constructed as part of the pipeline flow, but they were later separated to allow more flexibility for reprocessing.
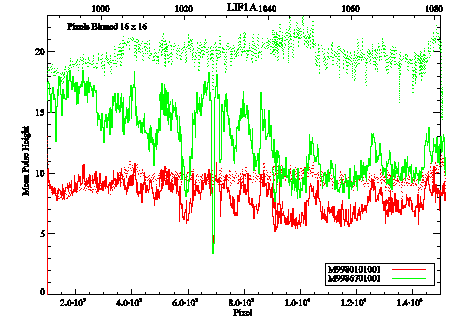
Figure 4‑20: